Ferraris are notorious for having high idle / standby current draw, and they end up with all sorts of weird and hard to troubleshoot issues if their battery voltage drops too low. They also often have radios and similar which need (expensive) reset codes, or alarm systems that decide to forget their fobs. They are also often stored for the winter (being high power rear wheel drive cars, usually with summer tires, driving them in the winter is often, um, exciting!).
This makes storing them on a battery charger or tender critical – unfortunately, many people have either lost their Ferrari branded charger, or never had one. The charger which Ferrari supplies with most of their vehicles is the lowest end CTEK charger, with a special connector – this connector plugs into a special jack (usually in the trunk or passenger footwell), which disables the starter motor (to prevent the embarrassing “driving down the road with the charger still connected” issue :-)) – more info on the charger connector.


The following contains some information on how I make these cables – I make other cables for mission-critical purposes, and so I’ve gotten into the habit of seriously over-engineering cables – while I could just slap the proprietary Ferrari connector on the end of the CTEK leads, instead I solder and crimp the contacts, moisture-proof the connectors (by blocking the unused pin and the rear with foam, and then fill the body with hot-glue), install 4 layers of heat-shrink, etc.
Each one takes me multiple hours to make, so here are instructions/picture in case you’d like to make your own.
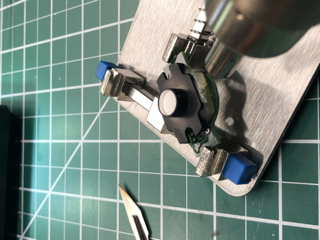
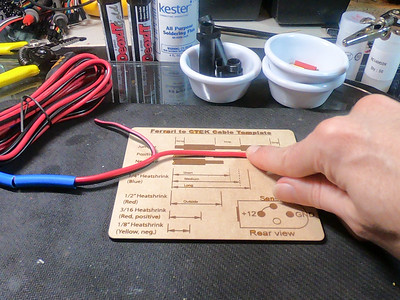
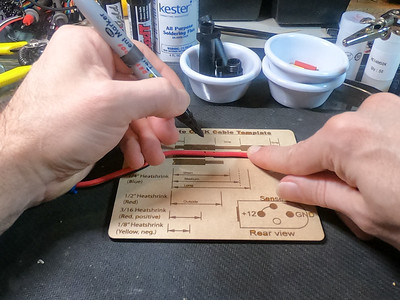
To improve quality I created a template on a laser cutter:
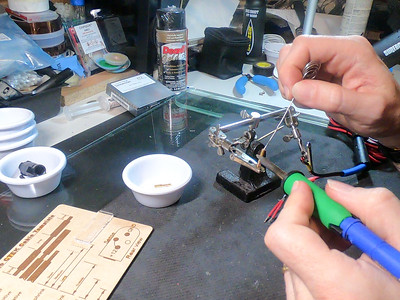
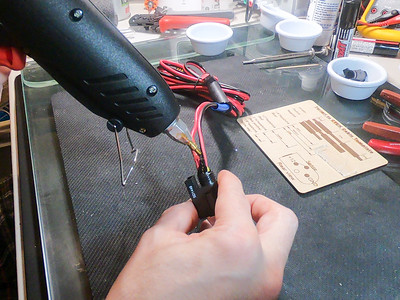
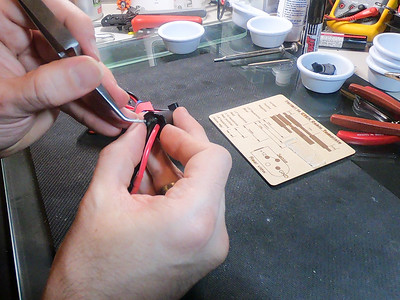
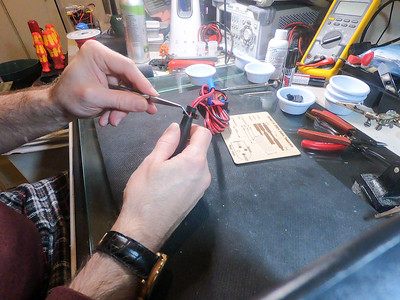
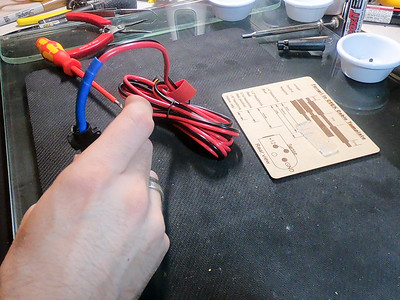
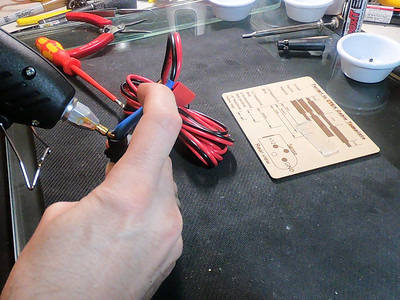
To improve the connector strength (and decrease resistance), I apply flux to the contact, then fill with solder, before inserting the wire (and backfilling with solder)

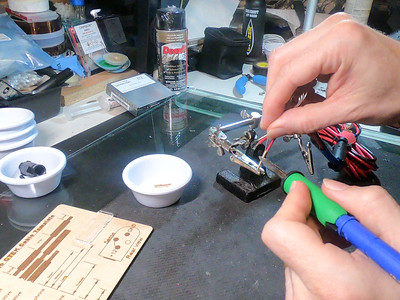
It is really important to use the correct crimping tool for these contacts – I have tested the pullout strength using just solder, solder and an incorrect crimp, and solder and the correct crimp. The correct crimp makes a huge difference. The solder and (correct) crimp also provided the lowest electrical resistance by far (tested using the four-wire Kelvin technique). These contacts really need the S16RCM1450 or S16RCM16 crimp heads (available from DigiKey or Mouser) and Souriau crimp handles – the set is somewhat expensive (at ~$400), but the quality of the crimp is well worth it.

To help with moisture protection, I cut and insert a small piece of foam into the unused contact spot



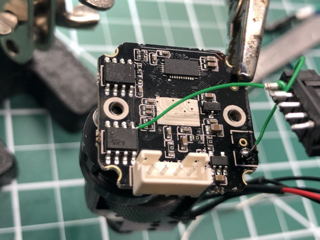
And then insert the contacts

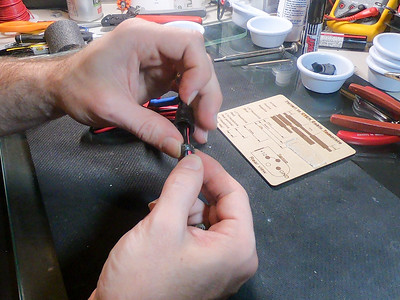
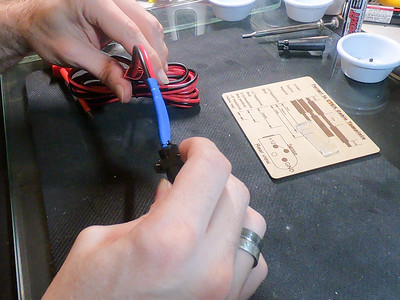
Getting them fully inserted is sometimes tricky, and so I strip a bit extra from the negative lead and then tin and heat-shink it just behind the connector – if I don’t do this, the insulation around the wire stops it seating properly. I then use a Molex-tyle pin remover to check that each pin is securely clipped in,


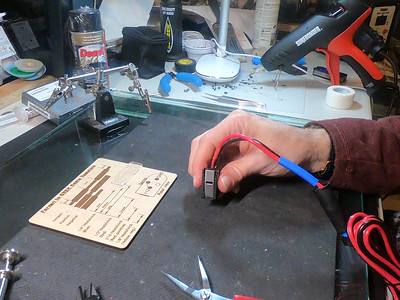
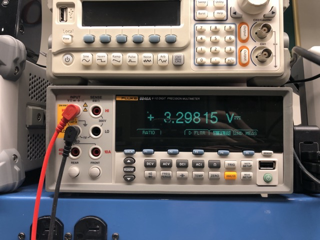
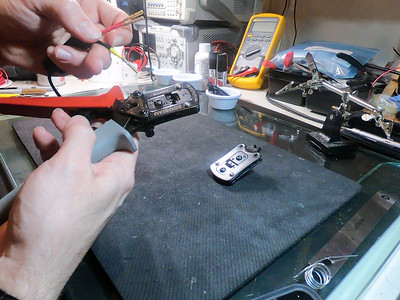
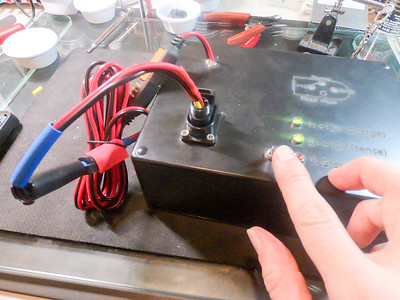
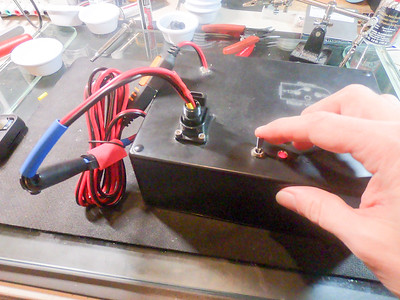
Once the pins are all inserted I do an initial test.
It then gets a good glob of waterproofing / strain-relief sealant on the contacts / wiring
Some more foam gets wrapped around the wires towards where the end of the strain relief boot goes, and (temporarily) held in place with some more sealant

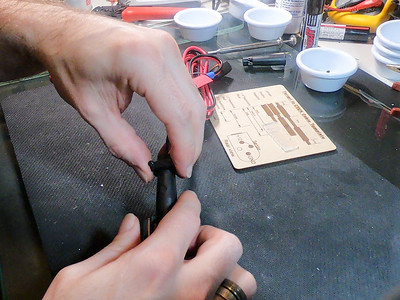
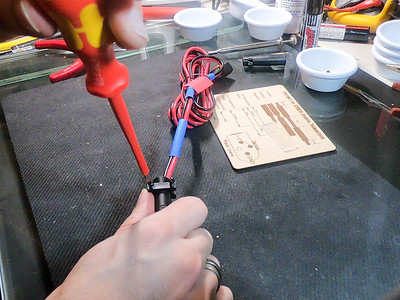
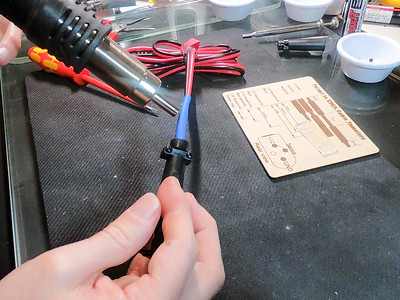
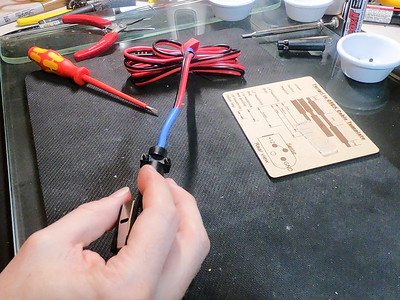
And now for the tricky bit. I add a bunch more sealant to the strain-relief boot, and then quickly screw it all together, before the sealant has a chance to set.
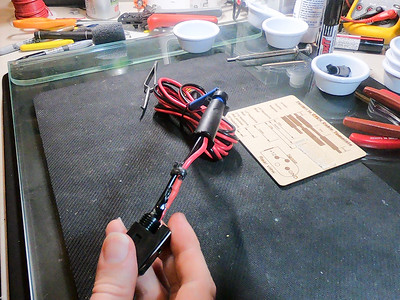
And then screw on the strain-relief clamp
Actually, this bit might be the trickiest, or at least the one with the most chance of cursing; right at the beginning of the process, I’ve (hopefully!) remembered to put on all of the extra water-proofing heatshrink.
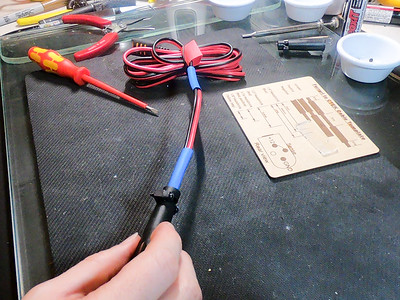
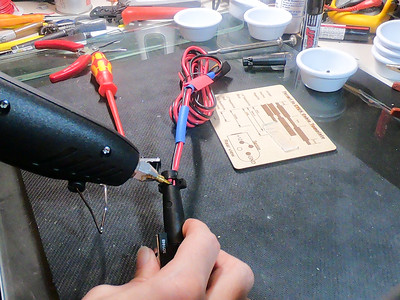
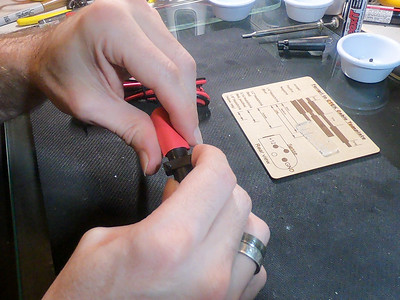
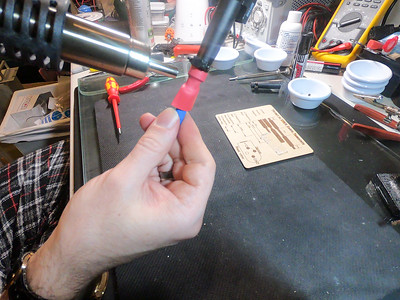
It gets (usually) 3 layers of heatshrink to build it up
And them some final sealant in the back of the boot
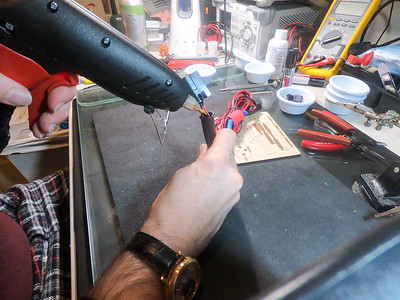
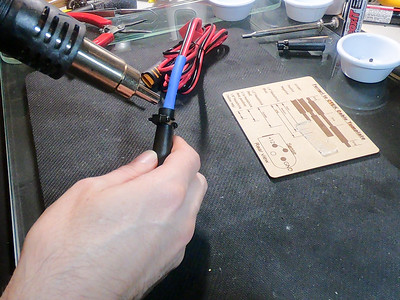
And then a final layer of heatshrink over all of this to finalize the seal.

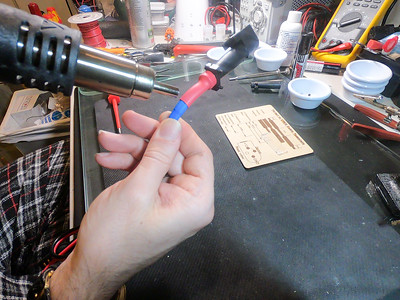
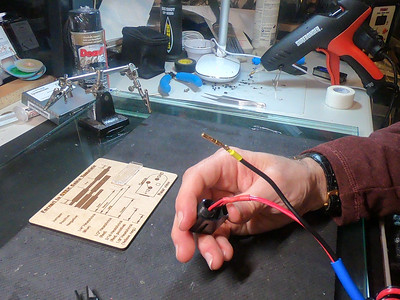
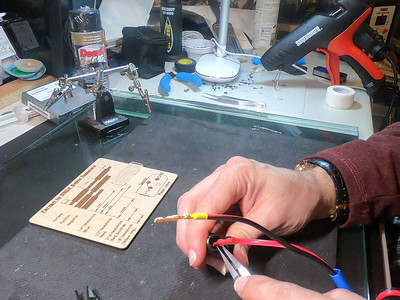
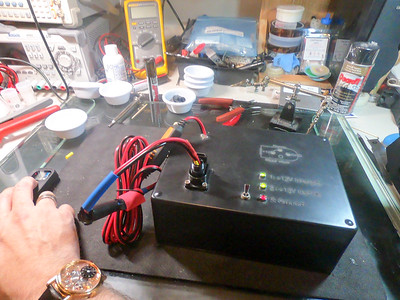
And the cable is all done, just needs a final test and label
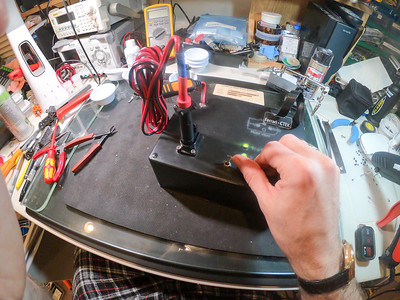
Done


Photo album: http://photos.kumari.net/Projects/CTEK-Ferrari-Cable-Instructions/ and older page with more details: https://www.kumari.net/index.php/cars/ferrari-battery-charger-cable